



Abstract
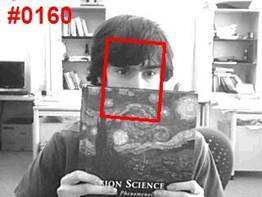
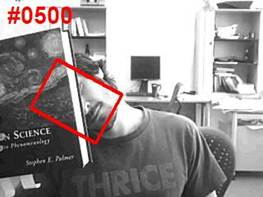
Online object tracking is a challenging
problem as it entails learning an effective model to account for appearance
change caused by intrinsic and extrinsic factors. In this paper, we propose a
novel online object tracking algorithm with sparse prototypes, which exploits both classic principal component analysis (PCA) algorithms with recent sparse representation
schemes for learning effective appearance models.
We introduce L1 regularization into the
PCA reconstruction, and develop a novel algorithm to represent an object by
sparse prototypes that account explicitly for data and noise. For tracking,
objects are represented by the sparse prototypes learned online with update. In
order to reduce tracking drift, we present a method that takes occlusion and
motion blur into account rather than simply includes image observations for
model update.
Both qualitative and quantitative
evaluations on challenging image sequences demonstrate that the proposed
tracking algorithm performs favorably against several state-of-the-art methods.
Highlights
★ A novel representation model: The tracked target
is represented by sparse prototypes that consist of a set of PCA basis vectors
and trivial templates.
★ An iterative algorithm to solve the representation
model.
★ A novel likelihood function that considers
occlusions as well as mis-alignments.
★ Outlier recovery
or rejection for online updating.
Paper and Code
Online Object Tracking with Sparse Prototypes. Dong Wang, Huchuan Lu, Ming-Hsuan Yang.
IEEE Transaction on Image
Processing (to appear).
[PDF]
[CODE] [DATA,RESULTS]
We appreciate that
you can cite our work if you use our code.